
本文将会针对增强现实(Augmented Reality,AR)技术的研究内容进行分析,希望能够给还没有入门或刚刚入门AR的朋友一个总体的认知,明确自己在AR领域可以开展哪些方面的研究,找准自己的佳切入点。
1 增强现实技术概览
增强现实技术主要包括图示的研究内容,当然还有一些比较生僻的内容没有列出来。本文介绍的增强现实相关的研究内容,包括但不限于介绍到的这些内容。增强现实是一个多学科交叉的研究领域,内容纷繁复杂,选取其中某个点深入下去都可以作为长久的研究课题。
2 增强现实研究内容分解
2.1 显示技术
2.1.1 近眼式显示设备
近眼显示设备主要是指头盔显示器。头盔显示器主要分为两种:光学透射式头盔显示器和视频透射式头盔显示器。当然如果按照显示器件数量,也可以划分为单目头盔显示器和双目头盔显示器。这里主要讨论光学式(图一)和视频式(图二)的区别。
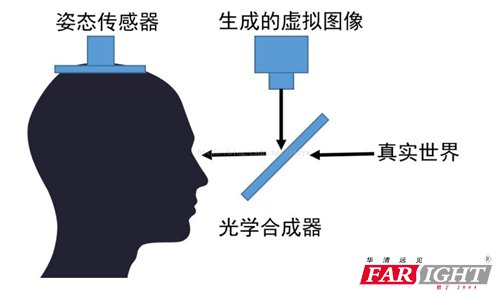
图一
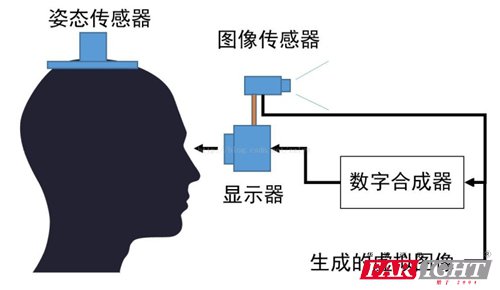
图二
光学透射式头盔显示器是直接透射外界的光线,并且反射微投影器件产生的虚拟图像到人眼中,达到虚实融合的效果。优点是可以保证正确的视点和清晰的背景,缺点是虚拟信息和真实信息融合度低,且人眼标定比较复杂。目前市面上典型的光学透射式头盔显示器有Hololens和Meta2等。
而视频透射式头盔显示器,是将固定在头盔上的摄像头所捕获的图像,通过视点偏移来显示到眼前的显示器上。优点是虚实融合效果好,无需标定人眼,缺点是视点难以完全补偿到正确的位置,且与镜片范围外的环境不能完美衔接。将上面的光学透射式头盔显示器,加上摄像头,并且把带有增强信息的视频直接全屏显示,就成为了视频透射式设备了。很巧的是,很多光学透射式设备,确实在其上加装了这种摄像头,但是它们的本意是用摄像头来作为跟踪模块的。
2.1.2 手持式显示设备
手持式显示设备,顾名思义就是拿在手上的显示设备。常见的就是我们的智能手机和平板电脑。这类设备具有很好的便携性,是一种天然的AR设备。它们有摄像头作为图像输入设备,有自带的处理器,有显示单元,具备了进行AR开发的所有条件。在目前市面上,很多增强现实APP都是围绕这类设备开发的。
2.1.3 固定式显示设备
桌面级显示器,这是我们日常生活中常见的一类显示器了。给它添加一个网络摄像头,就可以完成AR任务了。该摄像头可以捕捉空间中的图像,然后估计摄像头的位置和姿态,后计算生成虚拟信息,并进行虚实融合,输出到桌面显示器上。这类设备适合做一些科研类的开发,对于商业应用显得有些笨重,比起手机和平板来说稍逊一筹。
虚拟镜子,这是利用摄像头对着人进行拍摄,然后输出到一个类似于镜子的大型显示器上,给人一种照镜子的感觉。同时,还可以进行虚拟换装,或者添加一些虚拟物件,达到AR效果。
还有一些固定显示器,类似于雾幕、水幕、全息膜等,在上面投影出增强信息,可以实现AR效果。
2.1.4 投影式显示设备
投影机是一种重要的虚拟现实和增强现实设备。常见的基于投影的增强现实系统是在展会上的各种绚丽的投影展品,包括虚拟地球、汽车表面投影等。这类系统属于空间增强现实系统。另外,柱幕、球幕、环幕投影也可以归为基于投影的空间增强现实。
投影机还可以用于构建CAVE系统。手持式投影机结合图像捕捉设备,还可以建立动态的空间增强现实系统。
2.1.5 小结与分析
增强现实中主要的显示设备就是以上这些。如果要开展关于显示技术的研究,从硬件方面来讲,就是显示材料、器件的研发。当然这与增强现实并没有高度相关性,只能说显示设备参数的提升,可以间接促进增强现实系统性能提升。但是显示方面,软件还是可以有些值得做的东西,并且与增强现实体验息息相关。那就是头盔显示器的显示畸变校正和投影机画面拼接融合,这些技术都直接影响着增强现实系统虚实融合精度和整体可用性。
研究增强现实技术的人,很多是侧重于系统集成和应用测评,或者是直接将AR系统应用在其他的研究领域。因此,这些人一般不会研究显示元器件的细节,而更加关注如何拿现有的材料或者设备来构建新型显示系统。如果能够做出新的AR系统,并且具有实用意义,也是非常有研究价值的。
2.2 跟踪技术
跟踪理论会涉及到一些空间坐标转换的基础知识,以摄像机跟踪为例,分为模型坐标空间、世界坐标空间、摄像机坐标空间和图像坐标空间。由于比较细节,这里不展开讨论,相关知识可以查阅计算机视觉书籍即可。这里以不同种类的跟踪系统为例来讨论跟踪技术。
2.2.1 固定式跟踪系统
机械跟踪器通过控制机械臂各个关节的转动来跟踪机械臂末端的空间位置,属于比较老的跟踪方式,但是精度可以控制得比较高。
电磁跟踪器是通过一个固定的发射源发射出三维正交的电磁场,接收端通过检测接收到的电磁场的方向和强度来确定位姿。
超声波跟踪器则是通过测量一个声音脉冲从发射源到传感器的飞行时间来测量距离。
2.2.2 移动式传感器
GPS,全称是全球定位系统。这个系统在智能手机上应用很普遍。它通过接收多颗卫星信号来确定当前所处的位置。对于户外大范围增强现实有着重要意义。
无线网是通过检测移动设备接入点信息来粗略确定移动设备所处位置的。它可以配合GPS使用。
磁力计,也称电子罗盘,通过检测地球的磁场来确定方向。
陀螺仪和线性加速度计都是依靠惯性来进行测量的。陀螺仪测量三轴角度变化,线性加速度计测量位置变化。它们通常会配合使用,并且常以微机电系统(MEMS, Micro-Electro-Mechanical System)的形式存在。
里程计是通过轮式或者光电编码器来测量所走过路程的一种传感器,常用在机器人或者交通工具中。
2.2.3 光学跟踪技术
(1)跟踪模式
有些跟踪需要对被跟踪的目标预先建模,例如一些图像跟踪工具箱。有的则不需要提前建模,例如同步定位与跟踪技术(SLAM)。多数跟踪是需要提前建立一个待跟踪模型数据库的,然后在运行中实时提取特征并且与数据库中的数据进行比对。而SLAM则可以实时根据获得的特征,自主建立空间地图,并且确定摄像头相对于环境的位置。
目前研究的比较火热的是SLAM。因此,可以研究SLAM中的各个环节,从跟踪、建图、回环检测等角度研究如何提升SLAM系统的精度,以及面对复杂环境的稳定性。
(2)照明种类
跟踪的稳定性与环境光有关,尤其是基于视觉的跟踪。有些跟踪系统不需要自主添加光源,只是利用环境光,称为被动照明;有些跟踪需要主动发射某种照明光线,来实现其跟踪,称为主动照明。被动照明是比较常见的,例如平面标志跟踪就是在普通的环境照明下实现的。主动照明典型的就是结构光照明,例如Kinect。还有一种主动发射红外光的OptiTrack系统,做姿态跟踪效果很好。
(3)人工标志与自然特征
人工标志指的是人造的用于跟踪的图像标志等。例如二维码、棋盘格等。自然特征指的是自然环境中本身就有的特征,不是人为放置用来跟踪的特征。普通的室内环境、街边的楼宇都可以认为是自然特征。人工标志根据其种类不同,需要特定针对性算法进行检测和跟踪,自然特征通常使用SIFT、SURF、ORB等特征描述子来进行特征提取和跟踪。
2.2.4 传感器融合
互补式融合:不同的传感器测量的是不同种类的参数,可以互相补充。
竞争式融合:不同传感器测量的是同一个种类的参数,则使用某种方式将它们结合起来,产生一个更好的测量结果。
协作式融合:不同传感器之间是协作关系,其中某个传感器可能依赖于其他的传感器才能得出结果。
2.2.5 小结与分析
笔者认为,纯粹的跟踪技术研究,不仅可以服务于增强现实,也可以服务于虚拟现实,以及其他需要用到该技术的领域。研究跟踪技术,可以从多视图几何方向入手,通过几何的方式来估计位姿。也可以从特征角度入手,针对特定的问题,设计不同的特征表述方式,解决问题。
SLAM研究者们通常会考虑怎样建立更加稳健的SLAM系统,怎样对抗真实环境中的噪声,怎样进行更好的回环检测等。研究惯性测量单元(IMU)与视觉融合进行SLAM的也大有人在,多传感器数据融合对于SLAM来讲有重要的意义。
在研究基于视觉的跟踪技术时,会用到很多计算机视觉算法。计算机视觉本身就是一个很庞大的学科,感兴趣的读者可以根据自己的兴趣,选择相应的书籍进行展开阅读。这里推荐两本书,一本是《计算机视觉——算法与应用》,另一本是《计算机视觉中的多视图几何》。

热点新闻






